3.1 B1 - Le forze e l'equilibrio meccanico
3.1.1 Le forze e i loro effetti
La forza
Nel linguaggio comune il concetto di forza è quasi sempre legato allo
sforzo muscolare che si compie. Si richiede forza per lanciare un pallone o
per bloccarlo, ma si richiede forza anche per deviarne la direzione.
Sollevare una valigia, spingere un carrello, spostare un mobile o comprimere
una molla sono tutte azioni che richiedono l'intervento della forza
muscolare.
La forza muscolare non è l'unica forza possibile. In natura esistono
molti altri tipi di forze: la forza elastica, che riconduce i corpi
deformati alla loro forma originale, e la forza d'attrito, che, in
genere, si oppone al movimento dei corpi in contatto tra loro, sono esempi
di forze che agiscono per contatto.
Viceversa, la forza di gravità, che attira i corpi verso Terra,
e quella magnetica, che provoca l'attrazione tra un oggetto di
ferro e una calamita, sono esempi di forze che agiscono a distanza.
Quando una forza viene applicata a un corpo, essa può produrre due
diversi effetti:
-
un effetto statico, se provoca sulla materia esclusivamente
una deformazione;
- un effetto dinamico, nel caso in cui metta in moto un corpo
fermo (modificando il suo stato di quiete) ovvero acceleri, rallenti o arresti un corpo in movimento.
Definizione 3.1 [La forza]
una forza è un'azione in grado di produrre sul corpo su cui agisce una
deformazione (effetto statico) o una variazione di velocità (effetto
dinamico)
Prima di continuare
-
L'attrito è una forza che agisce per contatto. Vero o Falso?
- La deformazione di un corpo è l'effetto statico di una forza. Vero
o Falso?
- La forza di gravità è un tipo di forza muscolare. Vero o Falso?
- Una forza che arresta un corpo produce un effetto statico. Vero o
Falso?
- La forza magnetica è una forza d'attrazione esercitata sui corpi
dalla Terra. Vero o Falso?
- La forza elastica è una forza che agisce a distanza. Vero o Falso?
- Una forza che modifica lo stato di quiete di un corpo produce un
effetto dinamico. Vero o Falso?
3.1.2 Il peso e l'unità di misura della forza
La forza peso
Per dare una definizione operativa della grandezza forza possiamo puntare la nostra attenzione su una forza
molto importante e familiare a tutti: la forza peso. Tutte le volte che
lasciamo libero un oggetto, ci accorgiamo che esso spontaneamente cade, a
meno che non venga sostenuto per mezzo di un vincolo, per esempio un tavolo,
un chiodo o una mano. Questo fenomeno si verifica perché la Terra attrae
tutti gli oggetti che sono nelle sue vicinanze con una forza, chiamata forza
di gravità o forza peso, o semplicemente peso, che indicheremo con il
simbolo $vec(F_p)$
Le principali caratteristiche della forza peso sono le seguenti:
-
è sempre diretta lungo la verticale del luogo in cui si trova il
corpo;
- la sua intensità dipende dal luogo della Terra in cui si trova il
corpo, in quanto dipende dalla distanza che il corpo ha dal centro della
Terra. L'intensità della forza peso è quindi leggermente più
grande ai poli e più piccola all'equatore;
- in un dato luogo della Terra, la sua intensità è direttamente
proporzionale alla massa del corpo.
Il kilogrammo-peso e il newton
L'unità di misura della forza usata comunemente è il kilogrammo-peso
( kgp), cioè il peso di un corpo la cui massa è pari a 1 kg.
Tale unità di misura, tuttavia, non è utilizzata nel Sistema
Internazionale. Nel SI l'unità di misura della forza è il newton
(N): la sua scelta è stata basata sull'effetto dinamico della forza che
ha carattere universale e del quale ci occuperemo in seguito.
Definizione 3.2 [Unità di misura della forza - newton]
la forza di 1 newton è uguale al peso di un corpo avente una massa pari
a 1/9,8 kg (cioè circa 102 g)
$F_p = m g$
dove g è l'accelerazione di gravità che sulla Terra vale in media 9.8 N/ kg. E ancora, se pesassimo un corpo con una massa di 1 kg sulla Luna, otterremmo un valore di 1.6 N. Sulla Luna,
infatti, il valore di g è 1.6 N/ kg, cioè circa un
sesto del valore che ha sulla Terra.
Esempio 3.1
Qual è il peso, espresso in newton, di un corpo che ha una massa di 5 kg?
$P = 5\, uukg * 9.8\, uuN//uukg
= 49\, uuN$
Esercizio 3.1
Quanto peserebbe sulla Luna un corpo che sulla Terra ha una massa di 18 kg?
Prima di continuare
-
Il chilogrammo-peso è il .................. di un corpo la cui .................. è
pari a ..................
- La forza di $1\, uuN$ è uguale al ............... di un corpo la cui .................. è pari a ..................
- Sulla .................. il peso di un corpo
è pari a 1/6 di quello che esso ha sulla ...............
- A quanti grammi-peso corrisponde $1\, uuN$?
- A quanti newton corrisponde $1\, uug_p$?
- Una persona pesa $80\, uukg_p$ . Qual è
il suo peso espresso in newton?
- A quanti kilogrammi-peso corrisponde una forza di $700\, uuN$?
3.1.3 La misura statica delle forze
Legge di Hooke
Non tutti gli oggetti si comportano allo stesso modo quando subiscono delle
deformazioni. Vi sono corpi, come un pezzo di plastilina, che si deformano
in modo permanente, rimanendo deformati quando cessa l'azione della forza.
Tali corpi vengono chiamati corpi plastici. Al contrario, vi sono
corpi, come una molla o un elastico, che tornano alla forma iniziale non
appena cessa la forza applicata. Tali corpi vengono chiamati corpi elastici.
Abbiamo già visto che le molle e, più in generale, tutti i corpi
elastici soddisfano la legge di Hooke secondo la quale:
l'allungamento di una molla è direttamente proporzionale alla forza
applicata;
$F = k Delta L$
La costante di proporzionalità k è una proprietà della molla,
chiamata costante elastica, che ne caratterizza la rigidità: a parità
di forza applicata, quanto più elevato è il valore della costante
elastica della molla, quanto meno si deforma. Nel SI l'unità unità
di misura di k è N/m.
La legge di Hooke è valida solo entro certi limiti d'intensità della
forza applicata. Ogni corpo elastico presenta, infatti, un limite di
elasticità, che corrisponde alla forza massima cui il corpo può
essere sottoposto senza subire deformazioni permanenti. Se lo stesso corpo
viene ulteriormente sollecitato, si raggiunge il suo carico di
rottura, inteso come la forza minima in grado di spezzarlo in due.
Il dinamometro
Il dinamometro è lo strumento più comune per la misura statica delle
forze e il suo funzionamento si basa sulla legge di Hooke. Un dinamometro
è una molla tarata in unità di forza, cioè una molla la cui
estremità libera scorre su una scala graduata sulla quale si legge il
valore della forza che corrisponde a un determinato allungamento. La figura
seguente illustra, in modo schematico, la procedura di taratura di una
molla. Per tarare una molla occorre affiancare ad essa una scala graduata
che serve a indicare il valore della forza applicata. Collegando un indice
all'estremità libera della molla, si applicano successivamente alla
molla pesi di valore diverso, segnando sulla scala graduata il valore del
peso applicato.
Esempio 3.2
Un corpo con una massa di 5 kg viene applicato a un dinamometro con una
costante elastica di 200 N/m. Di quanto si allunga la molla del dinamometro?
- Il peso del corpo è $F_p=mg=49\, uuN$
- Applicando la legge di Hooke $DeltaL=F/k = (49\,
cancel(uuN))/(200\, cancel(uuN)//uum) = 0.24\, uum$
Esercizio 3.2
Un corpo con una massa di $10\, uukg$ viene
applicato a un dinamometro. La molla del dinamometro subisce un allungamento
di $0.1\, uum$. Calcola la costante elastica della
molla.
Prima di continuare
-
Qualunque modifica esteriore della ........................ di un oggetto indica che c'è una ........................
- Un oggetto che mantiene la forma assunta a causa della deformazione
è un corpo ........................
- L'elasticità è la proprietà dei corpi di subire, sotto
l'azione di determinate sollecitazioni, ........................ che ........................ al ........................
- La legge di Hooke stabilisce che un corpo ........................ subisce deformazioni ........................ proporzionali alla forza applicata.
- La costante elastica di una molla è il ........................ tra la ........................ applicata a una molla e l' ........................ della molla.
- Un corpo plastico, al cessare della sollecitazione, torna alla forma
iniziale. Vero o Falso?
- La plastilina è un esempio di corpo plastico. Vero o Falso?
- La deformazione di una molla è inversamente proporzionale alla
forza applicata. Vero o Falso?
- Il limite di elasticità di una molla rappresenta la forza più
piccola che può essere applicata a una molla. Vero o Falso?
- Il carico di rottura di una molla è sempre maggiore del suo limite
di elasticità. Vero o Falso?
- Una molla in acciaio, sottoposta all'azione di un peso a cui massa
è di $3.5\, uuk$g, subisce un allungamento di $7\, uucm$. Qual è il valore della costante
elastica della molla?
- Una molla, a cui è applicata una forza di $30\, uuN$, subisce un allungamento di $10\,
uucm$. Se alla molla viene appesa una massa di $3.5\, uukg$, quale sarà il suo allungamento?
3.1.4 Forze e vettori
Grandezze vettoriali
L'intensità è una misura dell'efficacia di una forza, ma da sola non
è sufficiente per caratterizzarla in modo completo.
Supponiamo infatti di trovarci in aeroporto e di dover spingere un carrello
con sopra i nostri bagagli. Dopo essere riusciti a muovere il carrello dalla
sua posizione iniziale, applicando una forza sufficientemente intensa,
bisogna scegliere una direzione: per esempio, ci si può muovere
parallelamente ai banchi del check-in o perpendicolamente a essi.
Ma anche questo non basta: per raggiungere la zona interessata, dovremo
scegliere anche il verso; per esempio, a destra se cerchiamo l'uscita o nel
verso opposto, cioè a sinistra, se dobbiamo imbarcarci. Dall'esempio si
deduce che per riuscire a descrivere in modo completo una forza occorre
definire non soltanto la sua intensità, ma anche la sua direzione e il
suo verso.
Grandezze vettoriali e grandezze scalari
La forza non è la sola grandezza fisica cui bisogna associare una
direzione e un verso. Se chiedi aiuto a un tuo amico per spostare un mobile
della tua stanza, dovrai dirgli non soltanto di quanto bisogna spostarlo, ma
anche lungo quale direzione e in quale verso.
Definizione 3.3 [Grandezze vettoriali]
Le grandezze fisiche definite, oltre che da un numero, da una direzione e da
un verso sono chiamate grandezze vettoriali.
Al contrario, grandezze fisiche come la massa, il volume e la temperatura
sono competamente descritte indicando il numero corrispondente alla loro
misura.
Definizione 3.4
Le grandezze fisiche delle quali è sufficiente conoscere il valore
numerico vengono chiamate grandezze scalari.
Vettori
Le forze e tutte le altre grandezze vettoriali vengono rappresentate
mediante un vettore. Un vettore è rappresentato graficamente da un
segmento orientato, come mostrato in figura:
In esso possiamo osservare i seguenti elementi:
-
l'estremo O del segmento è detto origine del vettore
(che, nel caso delle forze, corrisponde al punto di applicazione);
- l'estremo F del segmento è detto fine del vettore;
- la lunghezza del segmento, opportunamente riportata in scala,
rappresenta l'intensità, detta anche modulo, del
vettore. Essa corrisponde al valore assoluto della grandezza, cioè al
valore numerico senza considerarne il segno;
- la direzione del segmento coincide con la direzione del vettore;
- il verso del vettore è indicato dalla punta della
freccia.
Per indicare una grandezza vettoriale si usa soprassegnare il simbolo di
tale grandezza fisica con una freccina; per esempio, se vogliamo indicare
una forza, scriveremo $vec F$ . Se, invece, vogliamo riferirci al solo
modulo del vettore, scriveremo soltanto il simbolo della grandezza, senza la
freccina.
Prima di continuare
-
Per definire una grandezza vettoriale occorrono un ........................ una ........................ e un ........................
- Le grandezze fisiche delle quali è sufficiente conoscere il ........................ sono dette grandezze
........................
- Indica le grandezze Vettoriali e quelle Scalari:
a. temperatura V S b. tempo V S c. spostamento V S
d. velocità V S e. massa V S f. peso V S
3.1.5 Forza risultante e operazioni con i vettori
Forza risultante
È molto raro in natura che le forze agiscano da sole; è più
frequente il caso in cui su un corpo agiscono più forze
contemporaneamente, vale a dire agisce un sistema di forze. Quando
le forze agenti su un corpo hanno lo stesso punto di applicazione, cioè
sono forze concorrenti, per determinare l'effetto complessivo che
esse producono sul corpo bisogna ricavare la risultante del sistema di forze.
Definizione 3.5 [Forza risultante]
La risultante $vec(R)$ di un sistema di forze è quella forza che,
applicata da sola, produrrebbe lo stesso effetto del sistema di forze
realmente agenti sul corpo
La risultante di un sistema di forze coincide con la somma dei
vettori che rappresentano le singole forze del sistema. Effettuare la somma
di vettori, però, non è come sommare i numeri: infatti, le usuali
regole di calcolo, valide per i numeri reali, non possono essere applicate
ai vettori.
Esaminiamo ora i casi che si possono presentare.
Vettori con la stessa direzione e lo stesso verso
Il vettore $vec(b)$ e il vettore $vec(a)$ , paralleli tra loro, hanno
la stessa direzione (Fig a).
La rappresentazione grafica che ne deriva è riportata nella figura b. Il
vettore somma §vec(iiR)§, detto anche risultante, avrà la
stessa direzione e lo stesso verso dei due vettori componenti e
l'intensità pari alla somma delle intensità dei due vettori (Fig. c).
Pertanto, per calcolare matematicamente l'intensità del vettore
risultante si procederà nel seguente modo:
$R = a+b=3+3=6$
Vettori con la stessa direzione, verso opposto
Il vettore risultante ha la direzione e il verso del vettore che ha maggiore
intensità e per intensità la differenza delle due intensità,
come mostrato dalla seguente relazione matematica:
$R=a-b = 6-5=1$
Vettori con direzione diversa
La risultante dei due vettori si determina graficamente tramite una regola
chiamata regola del parallelogramma. Essa consiste nel costruire un
parallelogramma tracciando dalla punta di ciascun vettore la retta parallela
all'altro. La diagonale del parallelogramma ottenuto rappresenta la
risultante dei due vettori.
Vettori con direzioni perpendicolari
Quando le direzioni dei due vettori sono perpendicolari, il parallelogramma
si riduce a un rettangolo e il modulo R della risultante coincide con la
sua diagonale. In questo caso (e soltanto in questo) il modulo di
$vec(R)$ può essere calcolato analiticamente applicando il teorema di
Pitagora.
$R = sqrt(a^2+b^2)$
In alcuni casi, piuttosto che comporre le forze ricavandone la risultante,
è utile applicare il procedimento inverso, cioè scomporre una forza
in due componenti secondo due direzioni assegnate. Trovare le componenti di
una forza $vec(F)$ secondo due direzioni x e y significa
determinare i due vettori $vec(F_x)$ e $vec(F_y)$ la cui somma
coincide con $vec(F)$ .
Le componenti del vettore $vec(F)$ sono le proiezioni di
$vec(F)$ lungo i due assi x e y e possono essere determinate
tracciando le parallele alle rette x e y passanti per la fine del
vettore $vec(F)$, che rappresenta dunque la forza risultante dei due
vettori $vec(F_x)$ e $vec(F_y)$.
Esempio 3.3
Calcoliamo la risultante di due forze perpendicolari con moduli $F_1 = 4\, uuN$ e $F_2= 4\, uuN$
$R=sqrt(F_1^2 + F_2^2 ) = sqrt(16+9)=5\, uuN$
Prima di continuare
-
Il vettore risultante di due vettori che hanno la stessa direzione,
verso opposto e diversa intensità ha la direzione e il verso del vettore
che ha la ........................ intensità e per intensità la ........................ delle due intensità
- . La risultante dei due vettori con direzione diversa si ricava con la
cosiddetta ........................ del
........................
- Le componenti di un vettore sono le ........................ secondo due ........................ del vettore dato.
3.1.6 L'equilibrio del punto materiale
Equilibrio meccanico
Definizione 3.6 [Equilibrio meccanico]
Un corpo è in equilibrio meccanico quando è fermo oppure si muove
con velocità costante.
Lo studio dell'equilibrio meccanico risulta di importanza fondamentale in
molti campi dell'attività dell'uomo. Pensa, per esempio, alla
costruzione di un viadotto o di un grattacielo o, molto più
semplicemente, al montaggio di una tenda da campeggio.
Il problema dell'equilibrio meccanico è studiato da quella parte della
fisica chiamata statica e può essere cosí formulato: considerato un
corpo su cui agisce un sistema di forze, quali sono le condizioni che devono
verificarsi perché il corpo risulti in equilibrio meccanico?
Il punto materiale
Per semplificare lo studio dell'equilibrio dei corpi, in fisica è stato
introdotto il concetto di punto materiale.
Definizione 3.7 [Punto materiale]
Un punto materiale è un corpo ideale con dimensioni puntiformi, ma con
una massa diversa da zero.
Nonostante nessun corpo reale soddisfi tale definizione, un corpo le cui
dimensioni sono molto piccole rispetto a quelle dei corpi che lo circondano
e che è sottoposto a forze che hanno tutte lo stesso punto
d'applicazione può essere considerato un punto materiale (immagina per
esempio una pallina che rotola sul pavimento).
È evidente che quando un punto materiale non è sottoposto ad alcuna
forza, risulterà in equilibrio, ma lo sarà anche nel caso in cui le
forze agenti sono tali da annullarsi reciprocamente, ovvero quando la loro
risultante è nulla: per esempio, quando sul corpo agiscono due forze
uguali e opposte.
Definizione 3.8 [Equilibrio di un punto materiale]
un punto materiale è in equilibrio quando la risultante delle forze
applicate è nulla; viceversa, se la risultante delle forze applicate al
punto materiale è nulla, esso è in equilibrio meccanico.
Pertanto, se $vec(R)$ indica la risultante di un sistema di forze
applicate a un punto materiale, la condizione di equilibrio del punto si avrà se e soltanto se:
$vec R = 0$
Segue, evidentemente, che se è $vec R !=0 $, il punto materiale non
è in equilibrio.
Prima di continuare
-
Un punto materiale è un ........................ con dimensioni ........................ ma con ........................ diversa da zero.
- Un punto materiale è in equilibrio quando la ........................ delle ........................ è nulla.
- Se la ........................ dele
........................ applicate a un
punto materiale è ........................ , esso è in equilibrio meccanica.
- Un punto materiale è in equilibrio quando su di esso agisce una
sola forza. Vero o Falso?
- Due forze uguali e opposte applicate a un punto materiale lo mettono
in moto. Vero o Falso?
- Un corpo che si trova su un piano inclinato è sempre in
equilibrio. Vero o Falso?
- Un punto materiale è in equilibrio se la risultante delle forze a
esso applicate è uguale a zero. Vero o Falso?
3.1.7 L'equilibrio dei corpi rigidi
Corpo rigido
Lo studio dell'equilibrio meccanico dei corpi estesi (cioè di corpi che,
a differenza del punto materiale, hanno un'estensione diversa da zero) può essere semplificato introducendo il concetto di corpo rigido.
Definizione 3.9 [Corpo rigido]
un corpo rigido è un corpo ideale che si suppone perfettamente
indeformabile.
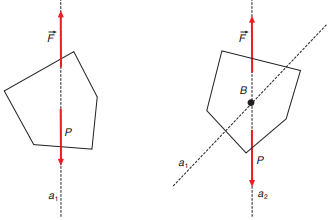
Al contrario di quanto accade per un punto materiale, il fatto che la
risultante delle forze applicate a un corpo rigido sia nulla non sempre ne
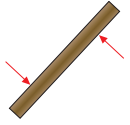
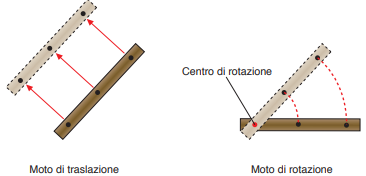
garantisce l'equilibrio. Per rendercene conto consideriamo un'asta rigida
cui sono applicate due forze uguali e opposte (quindi con risultante nulla)
ma le cui rette d'azione non siano coincidenti, cosí come rappresentato
in figura.
Sebbene le due forze abbiano risultante nulla, il corpo non è in
equilibrio, perché le due forze producono un movimento di rotazione
intorno al centro dell'asta. Ciò avviene perché l'annullarsi della
risultante delle forze applicate al corpo ne assicura soltanto l'equilibrio
rispetto al cosiddetto moto di traslazione del corpo, cioè quel
movimento in cui tutti i punti del corpo seguono traiettorie parallele l'una
all'altra. Per quanto riguarda, invece, il moto di rotazione, cioè il moto in cui un punto del corpo, chiamato centro di rotazione,
rimane fermo mentre tutti gli altri ruotano intorno a esso, il fatto che la
risultante delle forze sia nulla non garantisce la conservazione
dell'equilibrio.
Momento della forza
Mentre il moto di traslazione di un corpo rigido è governato dalla
risultante delle forze cui è soggetto, il moto di rotazione è
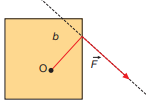
governato da un'altra grandezza fisica, chiamata momento della forza. Consideriamo una forza $vec(F)$ applicata a un corpo e un punto O (che
potrebbe anche non appartenere al corpo). Viene definito braccio
della forza rispetto al punto O la distanza b tra la retta su cui giace
la forza e il punto O.
Definizione 3.10 [Momento di una forza]
Il momento $M$ di una forza $vec(F)$ rispetto a un punto $O$ è il
prodotto dell'intensità della forza per il suo braccio $b$.
$M=F*b$
L'unità di misura del momento della forza è $uuN*uum$.
L'applicazione della forza a un corpo che ha un punto fisso ed è libero
di ruotare mette in rotazione il corpo stesso. Al momento della forza può
essere attribuito un segno positivo o negativo. Esso serve a indicare in
quale senso avviene la rotazione. Per determinare il segno del momento, si
deve prima scegliere (in modo arbitrario) un senso di rotazione positivo,
cosicché se la forza $vec(F)$ tende a far ruotare il corpo nel senso
prescelto allora il momento $M$ è positivo, in caso contrario il
momento è negativo. Spesso il verso scelto come positivo è quello
antiorario, cioè contrario a quello delle lancette dell'orologio.
Quando il corpo risente dell'azione di più forze bisogna considerare il
momento totale delle forze applicate al corpo.
Esempio 3.4
Una forza di $10\, uuN$ è applicata
perpendicolarmente a un'asta rigida, lunga $1\,
uum$, poggiata su un piano orizzontale. Calcoliamo il momento della forza
applicata all'asta rispetto al centro dell'asta.
Poiché la forza è perpendicolare all'asta, il suo braccio rispetto
al centro sarà pari a$b=0.5\, uum$ quindi il
momento della forza è:
$M=F*b=10\, uuN * 0.5\, uum = 5\, uuN*uum$
Esercizio 3.3
Una forza $vec(F)$ è applicata perpendicolarmente a un'asta rigida,
lunga $1\, uum$, poggiata su un piano orizzontale.
Calcola la lunghezza dell'asta sapendo che il momento di $vec(F)$ rispetto
al centro dell'asta è $10\, uuNm$.
Condizioni di equilibrio per un corpo rigido
Adesso che abbiamo definito il momento della forza siamo in grado di
precisare quali condizioni devono essere soddisfatte per l'equilibrio dei
corpi rigidi. Consideriamo un corpo rigido sottoposto all'azione di un
arbitrario sistema di forze. Abbiamo visto che se la risultante $vec(R)$
delle forze del sistema è nulla, l'unico movimento che può animare
il corpo è il moto di rotazione; ma se anche il momento totale $M_T$
del sistema di forze applicate al corpo è nullo, anche il moto di
rotazione risulterà impedito: il corpo sarà cosí costretto a
rimanere in equilibrio meccanico. Pertanto, la legge dell'equilibrio
meccanico per i corpi rigidi può essere cosí enunciata:
Definizione 3.11 [Equilibrio di un corpo rigido]
un corpo rigido è in equilibrio meccanico se e soltanto se la risultante
delle forze a esso applicate e il momento totale di tali forze sono nulli
$R=0 qquad M=0$
Le due precedenti condizioni costituiscono le equazioni cardinali
della statica.
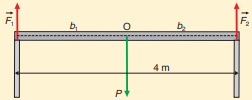
Esempio 3.5
Una trave del peso di $100\, uuN$ e con una
lunghezza di $4\, uum$ è poggiata su due
sostegni che si trovano alle due estremità della trave. Calcolare le
forze esercitate dai sostegni sulla trave.
Sulla trave sono applicate tre forze: le reazioni dei sostegni $F_1$ e
$F_2$ e il peso $P$. Poiché la trave è in equilibrio, la
risultante $R$ delle tre forze e il loro momento totale $M_T$ devono
essere nulli. Pertanto, considerando positive le forze che puntano verso
l'alto, calcolando il momento rispetto al centro della trave e considerando
positivo il momento che produce una rotazione in senso orario, possiamo
scrivere:
| $R=F_1+F_2-100=0$ |
| $M_T=F_1*b_1-F_2*b_2+P*0=0$ |
Da quest'ultima equazione otteniamo:
$F_1=F_2$
che sostituita alla prima fornisce:
$F_2+F_2-100=0$ cioè $2*F_2-100=0$
Pertanto
$2*F_2 =100$ da cui $F_2=100//2 = 50\, uuN$
dato che $F_1=F_2$ avremo anche $F_1=50\, uuN$.
Prima di continuare
-
Il momento $M$ di una forza $vec(F)$ rispetto al
...................... è il .......................
dell'....................... della forza per il suo ...................... .
- Il momento totale delle ...................... applicate a un corpo
è la ...................... dei ...................... delle singole
......................
- Un corpo rigido è in equilibrio meccanico se e soltanto se la
...................... delle forze a esso applicate e il
...................... di tali forze sono ......................
3.1.8 Il baricentro e le leve
Il baricentro dei corpi
Il peso di un corpo è la somma dei pesi delle singole parti da cui esso
è costituito. In altre parole, immaginando di suddividere il corpo in
tante piccole parti, ciascuna di esse risentirà di una forza peso
$vec(P_i)$. La risultante di queste piccole forze $vec(P_i)$ coincide
con il peso $vec(P)$ dell'intero corpo. Sebbene le forze $vec(P_i)$
siano applicate alle diverse parti in cui abbiamo ipotizzato di suddividere
il corpo, è lecito immaginare che il peso $vec(P)$ sia applicato a un
unico punto. Tale punto prende il nome di baricentro.
Definizione 3.12 [Baricentro]
Il baricentro di un corpo è il punto di applicazione della forza peso
Determinazione del baricentro
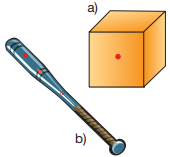
Nel caso in cui il corpo abbia una massa distribuita in modo uniforme e
forma regolare, il baricentro $B$ coincide sempre con il centro di
simmetria del corpo (Fig. a). Se il corpo non ha una forma regolare o se la
massa non è distribuita in modo uniforme, la posizione del baricentro sarà spostata verso la parte più pesante del corpo (Fig. b).
Ma in che modo è possibile determinarne con esattezza la posizione? Si può ricorrere a un metodo sperimentale.
Cosí come illustrato in figura , tale metodo consiste nell'appendere il
corpo di cui si vuole determinare il baricentro secondo due diverse
direzioni, determinando le rette d'azione $a_1$ e $a_2$ della forza
peso nei due casi.
In ciascuna delle due prove il corpo, appeso a un vincolo tramite un filo,
è in equilibrio meccanico sotto l'azione del peso $vec(P)$ e della
forza $vec(F)$ esercitata dal filo. La retta d'azione del peso coinciderà, dunque, con quella di $vec(F)$, cioè con la direzione del filo.
Poiché il baricentro del corpo deve trovarsi sia sulla retta $a_1$
sia sulla retta $a_2$, dovrà coincidere con la loro intersezione.
Le leve
Molti degli utensili di uso comune, come le pinze, l'apribottiglie o un paio
di forbici, sono macchine dette leve.
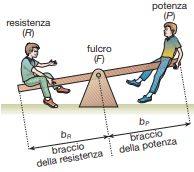
Definizione 3.13 [Leva]
Una leva è un dispositivo meccanico che permette di bilanciare una forza
$R$, chiamata resistenza, mediante un'altra forza $P$, chiamata
potenza.
Il rapporto
$V=R/P$
è chiamato vantaggio della leva. Se la potenza è più
piccola della resistenza sarà $V > 1$ e la macchina è
detta vantaggiosa, in quanto per bilanciare la forza $R$ è
sufficiente applicare una forza $P$ di intensità inferiore. È
evidente che la leva sarà tanto più vantaggiosa quanto più
grande è il valore di $V$.
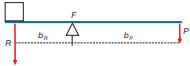
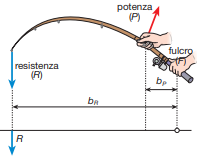
Rappresentata schematicamente, una leva è costituita da un'asta rigida
che può ruotare intorno a un punto fisso $F$ chiamato fulcro.
La potenza $P$ e la resistenza $R$, per esempio un peso che deve essere
sollevato, sono applicate rispettivamente a distanza $b_P$ e $b_R$ dal
fulcro. Quando la leva è in equilibrio i momenti delle due forze $P$ e
$R$ devono essere uguali ma con segno opposto, in modo tale che il momento
totale sia nullo. Pertanto, all'equilibrio si avrà:
$R*b_R = P*b_P$
da cui
$V=R/P=(b_P)/(b_R)$
La formula precedente mostra che il vantaggio $V$ è direttamente
proporzionale al braccio $b_P$ della potenza e inversamente proporzionale
al braccio $b_R$ della resistenza. Pertanto il vantaggio di una leva è
tanto maggiore quanto più la potenza è lontana dal fulcro e quanto più vicino a esso è applicata la resistenza.
La leva il cui funzionamento abbiamo appena descritto è una leva di
primo genere, perché il suo fulcro $F$ si trova tra la
potenza e la resistenza
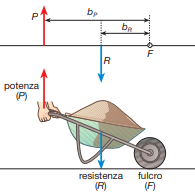
Una leva è,invece, detta di secondo genere quando $R$ si
trova tra $F$ e $P$
e di terzo genere quando $P$ si trova tra $F$ e $R$.
Prima di continuare
-
Il baricentro di un corpo è il ...................... d'
...................... della ......................
- Il baricentro di un corpo di forma ...................... e omogeneo
coincide con il suo ...................... di ......................
- Una leva è un ...................... meccanico che permette di
...................... una forza $R$, chiamata ......................,
mediante un'altra forza $P$, chiamata ......................
- Una leva è utilizzata per sollevare un peso di $200\, uuN$ applicando una potenza $P$. Il braccio della resistenza
è $b_R = 0.2\, uum$, quello di $P$ è
$b_P = 2\, uum$. Calcola:
- l'intensità di $P$
- il vantaggio della leva
- Calcola graficamente il baricentro delle seguenti figure geometriche

3.1.9 Prima di continuare
Domande e risposte
Domanda 3.1
Quali sono gli effetti di una forza?
Risposta1
Domanda 3.2
Qual è l'unità di misura della forza nel SI?
Risposta2
Domanda 3.3
Che cos'è la forza peso?
Risposta3
Domanda 3.4
Come si misura una forza?
Risposta4
Domanda 3.5
Qual è la differenza tra le grandezze scalari e quelle vettoriali?
Risposta5
Domanda 3.6
Come si ricavano la risultante di più forze e le componenti di una forza?
Risposta6
Domanda 3.7
Quali sono le condizioni di equilibrio di un punto materiale?
Risposta7
Parole chiave
| a. forza |
1. permette di effettuare la misura statica di una forza |
| b. forza a distanza |
2. è una conseguenza della forza di gravità |
| c. forza di contatto |
3. è caratterizzato da un modulo, una direzione e
un verso |
| d. elasticità |
4. i suoi effetti sono di due tipi: statico e dinamico |
| e. dinamometro |
5. ne è un esempio la forza d'attrito |
| f. peso |
6. ne è un esempio la forza magnetica |
| g. vettore |
7. la regola che permette di sommare più vettori |
| h. regola del parallelogramma |
8. il suo effetto è equivalente a quello
delle forze realmente
applicate a un punto materiale |
| i. risultante |
9. si realizza se la risultante è nulla |
| j. equilibrio meccanico |
10. consiste nella deformazione prodotta da una
forza |
| k. effetto statico |
11. la proprietà dei corpi che verificano la legge
di Hooke |
| l. effetto dinamico |
12. consiste negli effetti sul moto di una forza |
© Prof.ssa Anna Pellegrini - Ing. Luciano Pirri